For today GPU generation, we know a lot more about the hardware mechanism than for previous GPU generation, in particular thanks to the window open on this hardware by Cuda. But many hardware details are still hidden to the programmer, in particular mechanisms used for primitives rasterisation and fragments shading. As understanding how fragments are scheduled among the G80 processing units is a critical points for the research we do with Fabrice Neyret as part of my PhD, I wrote a small program allowing to investigate this point.
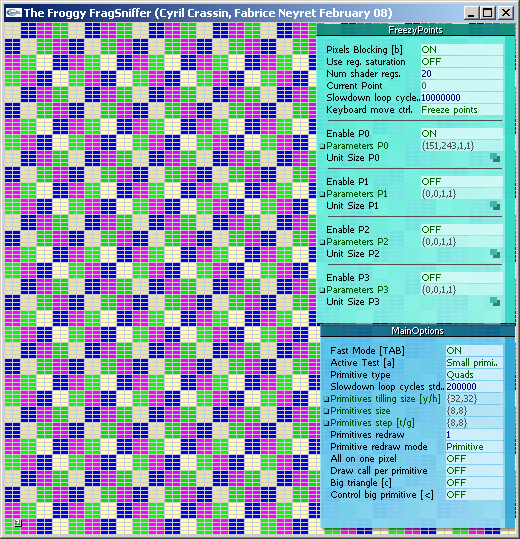
The probing tool I wrote is called The Froggy FragSniffer and can be downloaded here (see Readme for details):FragSniffer_0.2.zip
We also wrote a document that presents our motivations for this work, the experiments we made yet and the results and answers we get: Understanding G80 behavior
We hope this document will give you useful informations. We don’t want it to be closed and we want to make it evolve through new experiments and also thanks to exterior comments you can leave at the bottom of this page.

















 Il s’agit du projet d’application d’une UV de 2ième année sur les systèmes embarqués et temps réels. Le but était de réaliser un jeu du Tic Tac Toe (morpion) sur plateforme mobile J2ME permettant à 2 joueurs de s’afronter via une communication Bluetooth. Nous avons fait le choix avec Béatrice Frey de le faire en 3D via l’API mobile 3D.
Il s’agit du projet d’application d’une UV de 2ième année sur les systèmes embarqués et temps réels. Le but était de réaliser un jeu du Tic Tac Toe (morpion) sur plateforme mobile J2ME permettant à 2 joueurs de s’afronter via une communication Bluetooth. Nous avons fait le choix avec Béatrice Frey de le faire en 3D via l’API mobile 3D. Rapport LO52 Frey Crassin.pdf (
Rapport LO52 Frey Crassin.pdf ( Les TX sont des UVs spéciales à l’
Les TX sont des UVs spéciales à l’ Le but de ce projet était de mettre en application le cours d’optimisation et de recherche opérationnelle en créant un programme permettant la résolution du problème de pavage du plan, en utilisant un algorithme génétique (ou évolutionniste).
Le but de ce projet était de mettre en application le cours d’optimisation et de recherche opérationnelle en créant un programme permettant la résolution du problème de pavage du plan, en utilisant un algorithme génétique (ou évolutionniste). L’objectif de ce projet était de simuler le comportement d’un ensemble de fourmis dans un contexte compétitif sur un terrain parsemé de nourriture et d’obstacles. Le but principal était de concevoir une architecture objet propre et suffisament abstraite pour être réutilisable dans des projets futurs. Il a été réalisé en Java avec affichage 3D OpenGL via l’API GL4JAVA.
L’objectif de ce projet était de simuler le comportement d’un ensemble de fourmis dans un contexte compétitif sur un terrain parsemé de nourriture et d’obstacles. Le but principal était de concevoir une architecture objet propre et suffisament abstraite pour être réutilisable dans des projets futurs. Il a été réalisé en Java avec affichage 3D OpenGL via l’API GL4JAVA.





 Fluid.zip (
Fluid.zip (